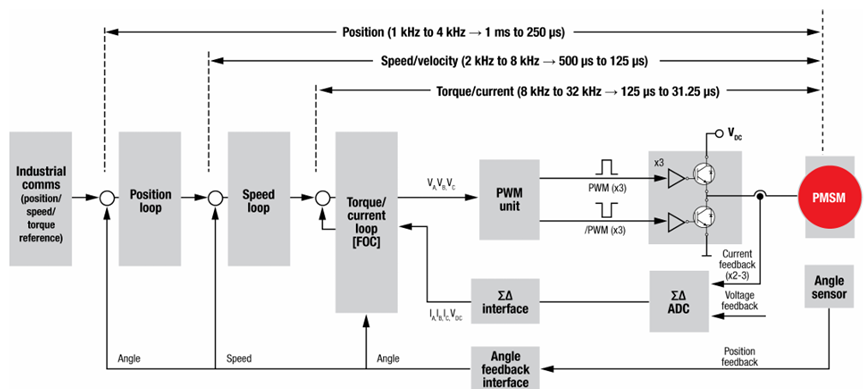
 人形机器人包括许多子系统,包括控制系统,电池管理系统(BMS),传感器系统,AI系统控制等。如果应将这些系统与人集成在一起,同时保持这种复杂的系统正常运行,则将很难满足加热加剧的尺寸和要求。人类机器人机器人空间限制最大的子系统是伺服控制系统。为了实现类似于人类的运动范围,通常在整个机器人中部署了大约40个伺服电动机(PMSM)和控制系统。电动机分布在机器人身体的不同部位,例如颈部,躯干,手臂,腿,脚趾等。此数字不包括手的电动机。为了模仿人手的自由操作,一只手可能包括多达十二个微型电动机。这些摩托车的电源要求取决于执行的特定操作;例如,驾驶机器人手指的电动机可能仅需几个电流的安培,而驾驶臀部或腿部的电动机可能需要100安培或更多。本文指出:与传统的伺服系统相比,人形机器人的伺服系统具有更高的控制,大小和散热要求的精度。本文介绍了GAN(氮化炮)对运动驱动器的各种好处,并展示了GAN如何帮助解决人形机器人中伺服系统面临的挑战。对伺服电动机驱动应用的更准确控制,电动机控制通常分为几个控制回路层:电流/扭矩回路,环路速度,循环位置和更高的控制环路。这些循环通常以级联形式排列,每个循环都有“实时”处理要求。电流/扭矩循环是最快的控制循环。每个上游循环都在多个以前的循环中运行,并提供了下游环路输入的引用。图1显示了典型的级联控制拓扑。图1。通用控制电动机控制LOP技术控制循环的最重要部分是当前循环。通常,在当前循环中,FET传递频率相同,约为8kHz至32kHz。当前循环的速度直接影响电动机控制响应的准确性和速度。人形机器人的简单作用涉及控制多个摩托车。为了协调机器人体内近40辆摩托车,同时保持系统的稳定性,每个关节的响应速度和速度必须满足非常高的要求。可以通过增加电机控制环的PWM的速度和频率来满足这些要求。例如,100kHz的偏移频率(图2)可以达到更高的电动机分辨率电流,从而导致电动电流波纹较小和更准确的控制。电流波的高分辨率还意味着可以获得更好的正弦电流,这可以提高运动效率并降低运动加热。照片2。100KHz和10kHz PWM电动机电流添加,增加的PWM传输频率可以降低直流总线电容器的尺寸和电容。前锋电容器取代了陶瓷电容器,需要解决的公交容量要求减少。伺服功率阶段FET通过PWMKKKIK金电流信号定期从总线电容器中绘制。随着PWM频率的增加,每单位时间消耗的充电量减少,这意味着降低所需的总线容量。根据TIDA-010936测试,将PWM频率从20kHz增加到80kHz后,可以用具有相等容量的陶瓷电容器代替电解电容器,以获得相同的总线电压波。与电解电容器相比,陶瓷电容器具有明显的好处:尺寸较小,使用寿命更长,高频率属性等。因此,应考虑当前环和眼睛-Catchingas PWM频率的较高速度在设计类人形机器人时。对于MOSFET型伺服驱动器,增加的PWM传输频率将造成巨大的额外损失,从而导致驾驶员的极端热量。当传输频率从10kHz增加到20kHz时,MOSFET型驱动因素将一般损失增加20%至30%,这对于人形机器人来说是不可接受的。另外,GAN FET在高频移动方面的损失较低。在TIDA-010936测试中,板的损失约为40kHz和80kHz,因此GAN特别适合传输频率方案。图3。在48V输入电压下DA-010936电路板的损失与三相输出电流之间的相关性是为什么减少损失转移可以在转移中实现帮派低损失的原因是由于GAN设备的特征。 GAN设备具有较小的栅极电容(CG)和较小的输出电容(COSS),这使移动速度可达MOSFET的100倍。由于关闭的缩短和及时,死者的时间可以在短范围内(例如10-20NS)控制,而MOSFET通常需要大约1US的死时间。死亡时间的短暂性可以减少运动中的损失。此外,gan fet没有身体二极管,但是通过第三个象限操作实现了自由轴的功能。在具有高PWM频率的情况下,MOSFET主体的二极管将导致恢复恢复的重大损失(QRR损失)。象限的第三次操作还将防止由二极管身体引起的移动节点振铃和EMI的风险,从而减少对人形机器人的高功率密度的破坏。较小的人形机器人的关节空间有限。电源板通常是直径为5-10厘米的PCB环。此外,关节应包括摩托车,还原器,编码器甚至传感器。对于设计师而言,在有限的空间中实现增加强度和更稳定的电动机控制非常重要。比较to MOSFET,GAN具有较小的RSP(特殊电阻,与模具区域的大小进行比较),这意味着与具有相同RDSON的MOSFET相比,GAN的死亡面积较小。德州仪器(TI)通过合并栅栏和驱动器进一步减少了足迹。这允许门的4.4mΩ半色 +驱动器,仅密封4.5 x 5.5mm。图4。LMG2100Blockdiagram作为示例获取LMG2100R026。该设备结合了半充气的FET和半桥驱动器,可以承受连续的55A电流。将驱动程序与FET合并有许多优势,包括:•降低门铃,使更可靠的操作如图5所示,由于栅极驱动器的整合以及gan的RSP降低,整个动力设备的芯片面积已减少了50%以上。图5。GAN与MOSFET功率阶段相比TIDA-010936 48V/16A组合电动机驱动器参考参考文献的小型三相Gany逆变器参考设计参考e This reference shows a high power density 12V to 60V Three-Phase Power stage using three LMG2100R04444444444444444444444444444444444 100v, 35a Gallium Gallium Nitride (gan) half-bridges and integrates gan fets, drivers and boottraraptrap and bootstrap and bootstrap.二极管专为集成的伺服驱动程序和机器人应用而设计。使用IN241A电流传感放大器或功能隔离的AMC0106M05δ-WIGGLE调制器的准确相电流传感,还测量了直流总线和相电压,证明了高级无传感器设计,例如InstaspAspInfoc™。该设计提供了与Ti BoosterPack™兼容的3.3V I/O接口,可连接到C2000™MCU LaunchPad™开发套件或SITARA™MICCONTROLLER,以便快速简便地审查Gan Gan的技术技术。具有少量的LMG2100R044燃气半桥,可提供高功率密度和简单的PCB 40KHz高效率PWM(99.3%峰值)PWM的操作,这有助于减少SIze and height of the DC bush bush by changing, which changes the size and height of the DC bush bush electrolytic capacitors zero reverse recovery loss reducing the moving node oscillation 16.6ns low dead time minimiz PWM Refusal Combined Evaluation Board BoostXL-LMG2100-MD-LMG2100 Boost Evaluation Module LaUNCHXLXL-F28P65X-C2000 ™ Real-Time MCU F28P65X启动PAD™开发套件软件开发套件(SDK)C2000软件 - 机关连接软件开发套件(SDK),用于C2000™MDU-TIDA-010936概述参考设计的参考设计和证明的绩效绩效绩效效果效果数据绩效效果的铺设3型台式36设计了36号式的台阶。用于开发PCB设计布局类人体机器人的图层绘制文件对控制准确性和功率密度有很高的要求。 GAN可在高损失较低的高PWM频率下更轻松,更高的电动机控制精度。 GAN的高密度特性组合随着德州仪器(TI)的组合驱动力可以减小尺寸。由于这些优势,电机类型驱动程序可以成为人形机器人的首选设计,从而实现更好,更强,更智能的机器人设计。除类型机器人外,GAN技术也是其他类型的机器人(合作伙伴机器人,外科机器人,AGV),工业系统,家用电器和其他需要高功率密度的应用的理想选择。
人形机器人包括许多子系统,包括控制系统,电池管理系统(BMS),传感器系统,AI系统控制等。如果应将这些系统与人集成在一起,同时保持这种复杂的系统正常运行,则将很难满足加热加剧的尺寸和要求。人类机器人机器人空间限制最大的子系统是伺服控制系统。为了实现类似于人类的运动范围,通常在整个机器人中部署了大约40个伺服电动机(PMSM)和控制系统。电动机分布在机器人身体的不同部位,例如颈部,躯干,手臂,腿,脚趾等。此数字不包括手的电动机。为了模仿人手的自由操作,一只手可能包括多达十二个微型电动机。这些摩托车的电源要求取决于执行的特定操作;例如,驾驶机器人手指的电动机可能仅需几个电流的安培,而驾驶臀部或腿部的电动机可能需要100安培或更多。本文指出:与传统的伺服系统相比,人形机器人的伺服系统具有更高的控制,大小和散热要求的精度。本文介绍了GAN(氮化炮)对运动驱动器的各种好处,并展示了GAN如何帮助解决人形机器人中伺服系统面临的挑战。对伺服电动机驱动应用的更准确控制,电动机控制通常分为几个控制回路层:电流/扭矩回路,环路速度,循环位置和更高的控制环路。这些循环通常以级联形式排列,每个循环都有“实时”处理要求。电流/扭矩循环是最快的控制循环。每个上游循环都在多个以前的循环中运行,并提供了下游环路输入的引用。图1显示了典型的级联控制拓扑。图1。通用控制电动机控制LOP技术控制循环的最重要部分是当前循环。通常,在当前循环中,FET传递频率相同,约为8kHz至32kHz。当前循环的速度直接影响电动机控制响应的准确性和速度。人形机器人的简单作用涉及控制多个摩托车。为了协调机器人体内近40辆摩托车,同时保持系统的稳定性,每个关节的响应速度和速度必须满足非常高的要求。可以通过增加电机控制环的PWM的速度和频率来满足这些要求。例如,100kHz的偏移频率(图2)可以达到更高的电动机分辨率电流,从而导致电动电流波纹较小和更准确的控制。电流波的高分辨率还意味着可以获得更好的正弦电流,这可以提高运动效率并降低运动加热。照片2。100KHz和10kHz PWM电动机电流添加,增加的PWM传输频率可以降低直流总线电容器的尺寸和电容。前锋电容器取代了陶瓷电容器,需要解决的公交容量要求减少。伺服功率阶段FET通过PWMKKKIK金电流信号定期从总线电容器中绘制。随着PWM频率的增加,每单位时间消耗的充电量减少,这意味着降低所需的总线容量。根据TIDA-010936测试,将PWM频率从20kHz增加到80kHz后,可以用具有相等容量的陶瓷电容器代替电解电容器,以获得相同的总线电压波。与电解电容器相比,陶瓷电容器具有明显的好处:尺寸较小,使用寿命更长,高频率属性等。因此,应考虑当前环和眼睛-Catchingas PWM频率的较高速度在设计类人形机器人时。对于MOSFET型伺服驱动器,增加的PWM传输频率将造成巨大的额外损失,从而导致驾驶员的极端热量。当传输频率从10kHz增加到20kHz时,MOSFET型驱动因素将一般损失增加20%至30%,这对于人形机器人来说是不可接受的。另外,GAN FET在高频移动方面的损失较低。在TIDA-010936测试中,板的损失约为40kHz和80kHz,因此GAN特别适合传输频率方案。图3。在48V输入电压下DA-010936电路板的损失与三相输出电流之间的相关性是为什么减少损失转移可以在转移中实现帮派低损失的原因是由于GAN设备的特征。 GAN设备具有较小的栅极电容(CG)和较小的输出电容(COSS),这使移动速度可达MOSFET的100倍。由于关闭的缩短和及时,死者的时间可以在短范围内(例如10-20NS)控制,而MOSFET通常需要大约1US的死时间。死亡时间的短暂性可以减少运动中的损失。此外,gan fet没有身体二极管,但是通过第三个象限操作实现了自由轴的功能。在具有高PWM频率的情况下,MOSFET主体的二极管将导致恢复恢复的重大损失(QRR损失)。象限的第三次操作还将防止由二极管身体引起的移动节点振铃和EMI的风险,从而减少对人形机器人的高功率密度的破坏。较小的人形机器人的关节空间有限。电源板通常是直径为5-10厘米的PCB环。此外,关节应包括摩托车,还原器,编码器甚至传感器。对于设计师而言,在有限的空间中实现增加强度和更稳定的电动机控制非常重要。比较to MOSFET,GAN具有较小的RSP(特殊电阻,与模具区域的大小进行比较),这意味着与具有相同RDSON的MOSFET相比,GAN的死亡面积较小。德州仪器(TI)通过合并栅栏和驱动器进一步减少了足迹。这允许门的4.4mΩ半色 +驱动器,仅密封4.5 x 5.5mm。图4。LMG2100Blockdiagram作为示例获取LMG2100R026。该设备结合了半充气的FET和半桥驱动器,可以承受连续的55A电流。将驱动程序与FET合并有许多优势,包括:•降低门铃,使更可靠的操作如图5所示,由于栅极驱动器的整合以及gan的RSP降低,整个动力设备的芯片面积已减少了50%以上。图5。GAN与MOSFET功率阶段相比TIDA-010936 48V/16A组合电动机驱动器参考参考文献的小型三相Gany逆变器参考设计参考e This reference shows a high power density 12V to 60V Three-Phase Power stage using three LMG2100R04444444444444444444444444444444444 100v, 35a Gallium Gallium Nitride (gan) half-bridges and integrates gan fets, drivers and boottraraptrap and bootstrap and bootstrap.二极管专为集成的伺服驱动程序和机器人应用而设计。使用IN241A电流传感放大器或功能隔离的AMC0106M05δ-WIGGLE调制器的准确相电流传感,还测量了直流总线和相电压,证明了高级无传感器设计,例如InstaspAspInfoc™。该设计提供了与Ti BoosterPack™兼容的3.3V I/O接口,可连接到C2000™MCU LaunchPad™开发套件或SITARA™MICCONTROLLER,以便快速简便地审查Gan Gan的技术技术。具有少量的LMG2100R044燃气半桥,可提供高功率密度和简单的PCB 40KHz高效率PWM(99.3%峰值)PWM的操作,这有助于减少SIze and height of the DC bush bush by changing, which changes the size and height of the DC bush bush electrolytic capacitors zero reverse recovery loss reducing the moving node oscillation 16.6ns low dead time minimiz PWM Refusal Combined Evaluation Board BoostXL-LMG2100-MD-LMG2100 Boost Evaluation Module LaUNCHXLXL-F28P65X-C2000 ™ Real-Time MCU F28P65X启动PAD™开发套件软件开发套件(SDK)C2000软件 - 机关连接软件开发套件(SDK),用于C2000™MDU-TIDA-010936概述参考设计的参考设计和证明的绩效绩效绩效效果效果数据绩效效果的铺设3型台式36设计了36号式的台阶。用于开发PCB设计布局类人体机器人的图层绘制文件对控制准确性和功率密度有很高的要求。 GAN可在高损失较低的高PWM频率下更轻松,更高的电动机控制精度。 GAN的高密度特性组合随着德州仪器(TI)的组合驱动力可以减小尺寸。由于这些优势,电机类型驱动程序可以成为人形机器人的首选设计,从而实现更好,更强,更智能的机器人设计。除类型机器人外,GAN技术也是其他类型的机器人(合作伙伴机器人,外科机器人,AGV),工业系统,家用电器和其他需要高功率密度的应用的理想选择。
人形机器人包括许多子系统,包括控制系统,电池管理系统(BMS),传感器系统,AI系统控制等。如果应将这些系统与人集成在一起,同时保持这种复杂的系统正常运行,则将很难满足加热加剧的尺寸和要求。人类机器人机器人空间限制最大的子系统是伺服控制系统。为了实现类似于人类的运动范围,通常在整个机器人中部署了大约40个伺服电动机(PMSM)和控制系统。电动机分布在机器人身体的不同部位,例如颈部,躯干,手臂,腿,脚趾等。此数字不包括手的电动机。为了模仿人手的自由操作,一只手可能包括多达十二个微型电动机。这些摩托车的电源要求取决于执行的特定操作;例如,驾驶机器人手指的电动机可能仅需几个电流的安培,而驾驶臀部或腿部的电动机可能需要100安培或更多。本文指出:与传统的伺服系统相比,人形机器人的伺服系统具有更高的控制,大小和散热要求的精度。本文介绍了GAN(氮化炮)对运动驱动器的各种好处,并展示了GAN如何帮助解决人形机器人中伺服系统面临的挑战。对伺服电动机驱动应用的更准确控制,电动机控制通常分为几个控制回路层:电流/扭矩回路,环路速度,循环位置和更高的控制环路。这些循环通常以级联形式排列,每个循环都有“实时”处理要求。电流/扭矩循环是最快的控制循环。每个上游循环都在多个以前的循环中运行,并提供了下游环路输入的引用。图1显示了典型的级联控制拓扑。图1。通用控制电动机控制LOP技术控制循环的最重要部分是当前循环。通常,在当前循环中,FET传递频率相同,约为8kHz至32kHz。当前循环的速度直接影响电动机控制响应的准确性和速度。人形机器人的简单作用涉及控制多个摩托车。为了协调机器人体内近40辆摩托车,同时保持系统的稳定性,每个关节的响应速度和速度必须满足非常高的要求。可以通过增加电机控制环的PWM的速度和频率来满足这些要求。例如,100kHz的偏移频率(图2)可以达到更高的电动机分辨率电流,从而导致电动电流波纹较小和更准确的控制。电流波的高分辨率还意味着可以获得更好的正弦电流,这可以提高运动效率并降低运动加热。照片2。100KHz和10kHz PWM电动机电流添加,增加的PWM传输频率可以降低直流总线电容器的尺寸和电容。前锋电容器取代了陶瓷电容器,需要解决的公交容量要求减少。伺服功率阶段FET通过PWMKKKIK金电流信号定期从总线电容器中绘制。随着PWM频率的增加,每单位时间消耗的充电量减少,这意味着降低所需的总线容量。根据TIDA-010936测试,将PWM频率从20kHz增加到80kHz后,可以用具有相等容量的陶瓷电容器代替电解电容器,以获得相同的总线电压波。与电解电容器相比,陶瓷电容器具有明显的好处:尺寸较小,使用寿命更长,高频率属性等。因此,应考虑当前环和眼睛-Catchingas PWM频率的较高速度在设计类人形机器人时。对于MOSFET型伺服驱动器,增加的PWM传输频率将造成巨大的额外损失,从而导致驾驶员的极端热量。当传输频率从10kHz增加到20kHz时,MOSFET型驱动因素将一般损失增加20%至30%,这对于人形机器人来说是不可接受的。另外,GAN FET在高频移动方面的损失较低。在TIDA-010936测试中,板的损失约为40kHz和80kHz,因此GAN特别适合传输频率方案。图3。在48V输入电压下DA-010936电路板的损失与三相输出电流之间的相关性是为什么减少损失转移可以在转移中实现帮派低损失的原因是由于GAN设备的特征。 GAN设备具有较小的栅极电容(CG)和较小的输出电容(COSS),这使移动速度可达MOSFET的100倍。由于关闭的缩短和及时,死者的时间可以在短范围内(例如10-20NS)控制,而MOSFET通常需要大约1US的死时间。死亡时间的短暂性可以减少运动中的损失。此外,gan fet没有身体二极管,但是通过第三个象限操作实现了自由轴的功能。在具有高PWM频率的情况下,MOSFET主体的二极管将导致恢复恢复的重大损失(QRR损失)。象限的第三次操作还将防止由二极管身体引起的移动节点振铃和EMI的风险,从而减少对人形机器人的高功率密度的破坏。较小的人形机器人的关节空间有限。电源板通常是直径为5-10厘米的PCB环。此外,关节应包括摩托车,还原器,编码器甚至传感器。对于设计师而言,在有限的空间中实现增加强度和更稳定的电动机控制非常重要。比较to MOSFET,GAN具有较小的RSP(特殊电阻,与模具区域的大小进行比较),这意味着与具有相同RDSON的MOSFET相比,GAN的死亡面积较小。德州仪器(TI)通过合并栅栏和驱动器进一步减少了足迹。这允许门的4.4mΩ半色 +驱动器,仅密封4.5 x 5.5mm。图4。LMG2100Blockdiagram作为示例获取LMG2100R026。该设备结合了半充气的FET和半桥驱动器,可以承受连续的55A电流。将驱动程序与FET合并有许多优势,包括:•降低门铃,使更可靠的操作如图5所示,由于栅极驱动器的整合以及gan的RSP降低,整个动力设备的芯片面积已减少了50%以上。图5。GAN与MOSFET功率阶段相比TIDA-010936 48V/16A组合电动机驱动器参考参考文献的小型三相Gany逆变器参考设计参考e This reference shows a high power density 12V to 60V Three-Phase Power stage using three LMG2100R04444444444444444444444444444444444 100v, 35a Gallium Gallium Nitride (gan) half-bridges and integrates gan fets, drivers and boottraraptrap and bootstrap and bootstrap.二极管专为集成的伺服驱动程序和机器人应用而设计。使用IN241A电流传感放大器或功能隔离的AMC0106M05δ-WIGGLE调制器的准确相电流传感,还测量了直流总线和相电压,证明了高级无传感器设计,例如InstaspAspInfoc™。该设计提供了与Ti BoosterPack™兼容的3.3V I/O接口,可连接到C2000™MCU LaunchPad™开发套件或SITARA™MICCONTROLLER,以便快速简便地审查Gan Gan的技术技术。具有少量的LMG2100R044燃气半桥,可提供高功率密度和简单的PCB 40KHz高效率PWM(99.3%峰值)PWM的操作,这有助于减少SIze and height of the DC bush bush by changing, which changes the size and height of the DC bush bush electrolytic capacitors zero reverse recovery loss reducing the moving node oscillation 16.6ns low dead time minimiz PWM Refusal Combined Evaluation Board BoostXL-LMG2100-MD-LMG2100 Boost Evaluation Module LaUNCHXLXL-F28P65X-C2000 ™ Real-Time MCU F28P65X启动PAD™开发套件软件开发套件(SDK)C2000软件 - 机关连接软件开发套件(SDK),用于C2000™MDU-TIDA-010936概述参考设计的参考设计和证明的绩效绩效绩效效果效果数据绩效效果的铺设3型台式36设计了36号式的台阶。用于开发PCB设计布局类人体机器人的图层绘制文件对控制准确性和功率密度有很高的要求。 GAN可在高损失较低的高PWM频率下更轻松,更高的电动机控制精度。 GAN的高密度特性组合随着德州仪器(TI)的组合驱动力可以减小尺寸。由于这些优势,电机类型驱动程序可以成为人形机器人的首选设计,从而实现更好,更强,更智能的机器人设计。除类型机器人外,GAN技术也是其他类型的机器人(合作伙伴机器人,外科机器人,AGV),工业系统,家用电器和其他需要高功率密度的应用的理想选择。
人形机器人包括许多子系统,包括控制系统,电池管理系统(BMS),传感器系统,AI系统控制等。如果应将这些系统与人集成在一起,同时保持这种复杂的系统正常运行,则将很难满足加热加剧的尺寸和要求。人类机器人机器人空间限制最大的子系统是伺服控制系统。为了实现类似于人类的运动范围,通常在整个机器人中部署了大约40个伺服电动机(PMSM)和控制系统。电动机分布在机器人身体的不同部位,例如颈部,躯干,手臂,腿,脚趾等。此数字不包括手的电动机。为了模仿人手的自由操作,一只手可能包括多达十二个微型电动机。这些摩托车的电源要求取决于执行的特定操作;例如,驾驶机器人手指的电动机可能仅需几个电流的安培,而驾驶臀部或腿部的电动机可能需要100安培或更多。本文指出:与传统的伺服系统相比,人形机器人的伺服系统具有更高的控制,大小和散热要求的精度。本文介绍了GAN(氮化炮)对运动驱动器的各种好处,并展示了GAN如何帮助解决人形机器人中伺服系统面临的挑战。对伺服电动机驱动应用的更准确控制,电动机控制通常分为几个控制回路层:电流/扭矩回路,环路速度,循环位置和更高的控制环路。这些循环通常以级联形式排列,每个循环都有“实时”处理要求。电流/扭矩循环是最快的控制循环。每个上游循环都在多个以前的循环中运行,并提供了下游环路输入的引用。图1显示了典型的级联控制拓扑。图1。通用控制电动机控制LOP技术控制循环的最重要部分是当前循环。通常,在当前循环中,FET传递频率相同,约为8kHz至32kHz。当前循环的速度直接影响电动机控制响应的准确性和速度。人形机器人的简单作用涉及控制多个摩托车。为了协调机器人体内近40辆摩托车,同时保持系统的稳定性,每个关节的响应速度和速度必须满足非常高的要求。可以通过增加电机控制环的PWM的速度和频率来满足这些要求。例如,100kHz的偏移频率(图2)可以达到更高的电动机分辨率电流,从而导致电动电流波纹较小和更准确的控制。电流波的高分辨率还意味着可以获得更好的正弦电流,这可以提高运动效率并降低运动加热。照片2。100KHz和10kHz PWM电动机电流添加,增加的PWM传输频率可以降低直流总线电容器的尺寸和电容。前锋电容器取代了陶瓷电容器,需要解决的公交容量要求减少。伺服功率阶段FET通过PWMKKKIK金电流信号定期从总线电容器中绘制。随着PWM频率的增加,每单位时间消耗的充电量减少,这意味着降低所需的总线容量。根据TIDA-010936测试,将PWM频率从20kHz增加到80kHz后,可以用具有相等容量的陶瓷电容器代替电解电容器,以获得相同的总线电压波。与电解电容器相比,陶瓷电容器具有明显的好处:尺寸较小,使用寿命更长,高频率属性等。因此,应考虑当前环和眼睛-Catchingas PWM频率的较高速度在设计类人形机器人时。对于MOSFET型伺服驱动器,增加的PWM传输频率将造成巨大的额外损失,从而导致驾驶员的极端热量。当传输频率从10kHz增加到20kHz时,MOSFET型驱动因素将一般损失增加20%至30%,这对于人形机器人来说是不可接受的。另外,GAN FET在高频移动方面的损失较低。在TIDA-010936测试中,板的损失约为40kHz和80kHz,因此GAN特别适合传输频率方案。图3。在48V输入电压下DA-010936电路板的损失与三相输出电流之间的相关性是为什么减少损失转移可以在转移中实现帮派低损失的原因是由于GAN设备的特征。 GAN设备具有较小的栅极电容(CG)和较小的输出电容(COSS),这使移动速度可达MOSFET的100倍。由于关闭的缩短和及时,死者的时间可以在短范围内(例如10-20NS)控制,而MOSFET通常需要大约1US的死时间。死亡时间的短暂性可以减少运动中的损失。此外,gan fet没有身体二极管,但是通过第三个象限操作实现了自由轴的功能。在具有高PWM频率的情况下,MOSFET主体的二极管将导致恢复恢复的重大损失(QRR损失)。象限的第三次操作还将防止由二极管身体引起的移动节点振铃和EMI的风险,从而减少对人形机器人的高功率密度的破坏。较小的人形机器人的关节空间有限。电源板通常是直径为5-10厘米的PCB环。此外,关节应包括摩托车,还原器,编码器甚至传感器。对于设计师而言,在有限的空间中实现增加强度和更稳定的电动机控制非常重要。比较to MOSFET,GAN具有较小的RSP(特殊电阻,与模具区域的大小进行比较),这意味着与具有相同RDSON的MOSFET相比,GAN的死亡面积较小。德州仪器(TI)通过合并栅栏和驱动器进一步减少了足迹。这允许门的4.4mΩ半色 +驱动器,仅密封4.5 x 5.5mm。图4。LMG2100Blockdiagram作为示例获取LMG2100R026。该设备结合了半充气的FET和半桥驱动器,可以承受连续的55A电流。将驱动程序与FET合并有许多优势,包括:•降低门铃,使更可靠的操作如图5所示,由于栅极驱动器的整合以及gan的RSP降低,整个动力设备的芯片面积已减少了50%以上。图5。GAN与MOSFET功率阶段相比TIDA-010936 48V/16A组合电动机驱动器参考参考文献的小型三相Gany逆变器参考设计参考e This reference shows a high power density 12V to 60V Three-Phase Power stage using three LMG2100R04444444444444444444444444444444444 100v, 35a Gallium Gallium Nitride (gan) half-bridges and integrates gan fets, drivers and boottraraptrap and bootstrap and bootstrap.二极管专为集成的伺服驱动程序和机器人应用而设计。使用IN241A电流传感放大器或功能隔离的AMC0106M05δ-WIGGLE调制器的准确相电流传感,还测量了直流总线和相电压,证明了高级无传感器设计,例如InstaspAspInfoc™。该设计提供了与Ti BoosterPack™兼容的3.3V I/O接口,可连接到C2000™MCU LaunchPad™开发套件或SITARA™MICCONTROLLER,以便快速简便地审查Gan Gan的技术技术。具有少量的LMG2100R044燃气半桥,可提供高功率密度和简单的PCB 40KHz高效率PWM(99.3%峰值)PWM的操作,这有助于减少SIze and height of the DC bush bush by changing, which changes the size and height of the DC bush bush electrolytic capacitors zero reverse recovery loss reducing the moving node oscillation 16.6ns low dead time minimiz PWM Refusal Combined Evaluation Board BoostXL-LMG2100-MD-LMG2100 Boost Evaluation Module LaUNCHXLXL-F28P65X-C2000 ™ Real-Time MCU F28P65X启动PAD™开发套件软件开发套件(SDK)C2000软件 - 机关连接软件开发套件(SDK),用于C2000™MDU-TIDA-010936概述参考设计的参考设计和证明的绩效绩效绩效效果效果数据绩效效果的铺设3型台式36设计了36号式的台阶。用于开发PCB设计布局类人体机器人的图层绘制文件对控制准确性和功率密度有很高的要求。 GAN可在高损失较低的高PWM频率下更轻松,更高的电动机控制精度。 GAN的高密度特性组合随着德州仪器(TI)的组合驱动力可以减小尺寸。由于这些优势,电机类型驱动程序可以成为人形机器人的首选设计,从而实现更好,更强,更智能的机器人设计。除类型机器人外,GAN技术也是其他类型的机器人(合作伙伴机器人,外科机器人,AGV),工业系统,家用电器和其他需要高功率密度的应用的理想选择。